【学生シーズ特集】多脚型・球体型 変形移動ロボット
電気通信大学 情報理工学域Ⅱ類先端ロボティクスプログラム 3年 阿部涼
概要:蜘蛛のような動きをする多脚型と、転がるように動く球体型の、2つの移動方法を持つロボットを製作する。
(a)製作理由
現在、世の中には様々なロボットが存在するが、その中でも今回は移動できるロボットについて注目してみた。移動する手段としてはタイヤ、人型や蜘蛛型など脚を用いるもの、蛇型、キャタピラを用いるものなど様々である。ただし、それらにはそれぞれメリットとデメリットが存在する。例えば、タイヤを用いると高速で移動することが可能だが、段差を乗り越えることは難しい。もし、1台のロボットで複数の移動方式を持つことができれば、より多くの場面で活躍できるのではないかと考えた。そこで今回製作に挑もうとしているのが、「多脚型・球体型 変形移動ロボット」である。
(b)多脚型、球体型の理由
まず、それぞれのメリット、デメリットについてである。
多脚型「安定感がある、多少の荒地でも移動可能」「移動速度が遅い」
球体型「動きがスムーズ、速く動くことも可能」「制御が複雑、段差には弱い」
この2つの場合は脚を開閉するだけで変形できるのではないかと考え、製作に至った。こうすることで、その場所に応じた適切な手段を選択しながら移動することが可能である。
(C)設計
はじめに、プロトタイプの設計から始めた。CADソフトは「fusion 360」を用いた。図1は多脚型として移動する場合、図2は球体型として移動する場合のロボットである。基本的な構造としては中心の土台部分に6つの脚が固定されているイメージである。1つの脚は2つのサーボモーターによって動き、多脚型として移動する場合は上側3脚を開いて蜘蛛型のような形になる。
(d)プロトタイプ組み立て
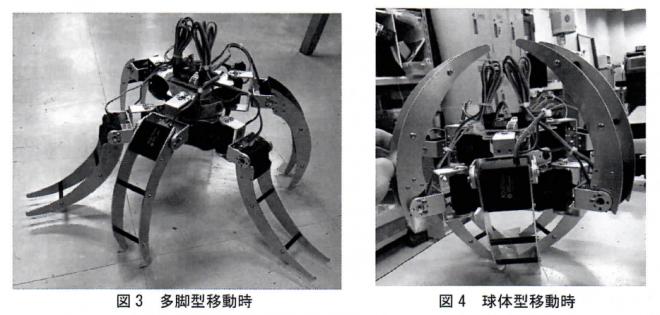
現在、基本部分の組み立ては終了した。その写真は、下の図3,4である。
主なデータについては以下の通りである。
重さ:およそ1㎏
サイズ:球体型移動時直径27㎝
サーボモーター:RDS3115 12個
コントロールボード:VS-RC003hv
主材料:アルミ板1.5㎜
組上げ後、多脚型として歩行モーションが可能であるか確かめた。今の所ゆっくりとしたスピードで少し脚を引きずるような形にはなるが、歩行モーションをつくることができた。
(e)今後の展望
多脚型として一通りの歩行モーション作成後は、球体型としての移動モーションの作製をしていきたい。ただし、現在は骨組みだけであり、表面の凹凸が激しいので、脚の先にカバーなどをしていきたいと考えている。このカバーは3Dプリンター等で作製していきたいと考えている。
さらに制御面であるが、球体型移動時には自分の姿勢を把握する必要があるため、ジャイロセンサーを用いることを考えている。現在はコントロールボードなど市販の物を用いているが、余裕があれば基板やプログラムを自作して、回路についての知識を深めていきたい。
※図2、3、4については産学連携推進協会のサイトをご参照ください
詳細内容
(a)製作理由
現在、世の中には様々なロボットが存在するが、その中でも今回は移動できるロボットについて注目してみた。移動する手段としてはタイヤ、人型や蜘蛛型など脚を用いるもの、蛇型、キャタピラを用いるものなど様々である。ただし、それらにはそれぞれメリットとデメリットが存在する。例えば、タイヤを用いると高速で移動することが可能だが、段差を乗り越えることは難しい。もし、1台のロボットで複数の移動方式を持つことができれば、より多くの場面で活躍できるのではないかと考えた。そこで今回製作に挑もうとしているのが、「多脚型・球体型 変形移動ロボット」である。
(b)多脚型、球体型の理由
まず、それぞれのメリット、デメリットについてである。
多脚型「安定感がある、多少の荒地でも移動可能」「移動速度が遅い」
球体型「動きがスムーズ、速く動くことも可能」「制御が複雑、段差には弱い」
この2つの場合は脚を開閉するだけで変形できるのではないかと考え、製作に至った。こうすることで、その場所に応じた適切な手段を選択しながら移動することが可能である。
(C)設計
はじめに、プロトタイプの設計から始めた。CADソフトは「fusion 360」を用いた。図1は多脚型として移動する場合、図2は球体型として移動する場合のロボットである。基本的な構造としては中心の土台部分に6つの脚が固定されているイメージである。1つの脚は2つのサーボモーターによって動き、多脚型として移動する場合は上側3脚を開いて蜘蛛型のような形になる。
(d)プロトタイプ組み立て
現在、基本部分の組み立ては終了した。その写真は、下の図3,4である。
主なデータについては以下の通りである。
重さ:およそ1㎏
サイズ:球体型移動時直径27㎝
サーボモーター:RDS3115 12個
コントロールボード:VS-RC003hv
主材料:アルミ板1.5㎜
組上げ後、多脚型として歩行モーションが可能であるか確かめた。今の所ゆっくりとしたスピードで少し脚を引きずるような形にはなるが、歩行モーションをつくることができた。
(e)今後の展望
多脚型として一通りの歩行モーション作成後は、球体型としての移動モーションの作製をしていきたい。ただし、現在は骨組みだけであり、表面の凹凸が激しいので、脚の先にカバーなどをしていきたいと考えている。このカバーは3Dプリンター等で作製していきたいと考えている。
さらに制御面であるが、球体型移動時には自分の姿勢を把握する必要があるため、ジャイロセンサーを用いることを考えている。現在はコントロールボードなど市販の物を用いているが、余裕があれば基板やプログラムを自作して、回路についての知識を深めていきたい。
※図2、3、4については産学連携推進協会のサイトをご参照ください
【お問い合わせ】
さらに詳しい内容は、一般社団法人産学連携推進協会へお問い合わせください。